
|
|
|
scorciatoie
|
| sei
qui: > home > offerta formativa > ingegneria meccatronica > elenco degli insegnamenti > meccanica degli azionamenti > home page del corso > materiale didattico > trasmissioni con organi flessibili |
| TRASMISSIONI CON ORGANI FLESSIBILI |
Meccanica degli Azionamenti
a cura di Michele Trancossi
Trasmissioni con Organi Flessibili

Introduzione alla teoria della trasmissione con organi flessibili
1. Coefficiente di attrito delle cinghie

Consideriamo una cinghia a V disposta all'interno della sua sede.
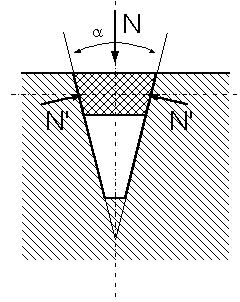 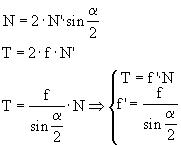
Dove f' é il coefficiente di attrito effettivo di una trasmissione a cinghie.
Se la cinghia é piana risulta che f'=f.
La pił interessante proprietą delle cinghie a V é che posseggono un coefficiente di attrito equivalente molto superiore a quello che di norma esiste tra i materiali di cui sono fatte le superfici esterne.
Altri tipi di cinghie a V  Quando si devono trasmettere potenze elevate si usano pulegge con pił cinghie a V in parallelo che si avvolgono su altrettante gole ricavate nella stessa puleggia. In altre applicazioni si possono usare cinghie V ad anelli, formate da tanti tronchi di cinghia a V collegati tra loro da anelli metallici; Quando si devono trasmettere potenze elevate si usano pulegge con pił cinghie a V in parallelo che si avvolgono su altrettante gole ricavate nella stessa puleggia. In altre applicazioni si possono usare cinghie V ad anelli, formate da tanti tronchi di cinghia a V collegati tra loro da anelli metallici;
 Cinghie rotonde si usano per applicazioni leggere e sono formate da un cavo di gomma eventualmente rinforzato con elementi metallici; Cinghie rotonde si usano per applicazioni leggere e sono formate da un cavo di gomma eventualmente rinforzato con elementi metallici;
 Le cinghie a costole sono formate da pił cinghie a V collegate da un'unica anima in materiale plastico. Uniscono la semplicitą e la robustezza delle cinghie piane con l'elevato coefficiente di attrito delle cinghie a V. (il maggiore rischio da evitare é che le costole possano strisciare l'una contro l'altra. Le cinghie a costole sono formate da pił cinghie a V collegate da un'unica anima in materiale plastico. Uniscono la semplicitą e la robustezza delle cinghie piane con l'elevato coefficiente di attrito delle cinghie a V. (il maggiore rischio da evitare é che le costole possano strisciare l'una contro l'altra.
2. Trasmissione del Moto mediante Cinghie
Definizioni:  Puleggia Motrice: sono quelle su cui la coppia agente e la velocitą angolare hanno verso concorde. Puleggia Motrice: sono quelle su cui la coppia agente e la velocitą angolare hanno verso concorde.
 Puleggia Condotta: sono quelle su cui la coppia agente e la velocitą angolare hanno verso discorde. Puleggia Condotta: sono quelle su cui la coppia agente e la velocitą angolare hanno verso discorde.
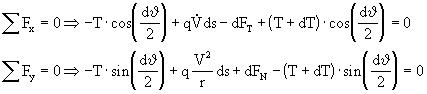
Si consideri in corrispondenza al all'angolo generico un tratto elementare cinghia di lunghezza .
Su tale elemento agiscono le forze seguenti: possiamo allora fare l'equilibrio del sistema considerato secondo le direzioni normale e tangenziale.
a cui si devono aggiungere la condizione di attrito

e la relazione geometrica

Inoltre si ricorda che, avendo a che fare con infinitesimi risulta:

Pertanto risulta:
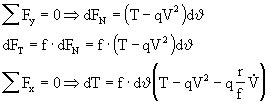
in cui il termine

Integrando l'ultima equazione differenziale si ottiene:
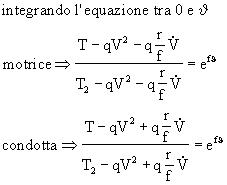
e diventano entrambe del tipo:

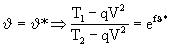
Perciņ estendendo l'integrazione all'intero arco di contatto
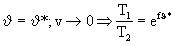
Inoltre se la velocitą tangenziale della cinghia é piccola risulta:
Tutto il discorso fatto vale anche per le cinghie a V a patto di sostituire f con f'
|
|